Навигация
Календарь
Машина Тьюринга. Задачи и решения
Один из важнейших вопросов современной информатики — существует ли формальный исполнитель, с помощью которого можно имитировать любого формального исполнителя. ответ на этот вопрос был получен почти одновременно двумя выдающимися учеными — А. Тьюрингом и Э. Постом. Предложенные ими исполнители отличались друг от друга, но оказалось, что они могут имитировать друг друга, а главное — имитировать работу любого формального исполнителя.
Что такое формальный исполнитель? Что значит — один формальный исполнитель имитирует работу другого формального исполнителя? Если Вы играли в компьютерные игры — на экране объекты беспрекословно подчиняются командам играющего. Каждый объект обладает набором допустимых команд. В то же время компьютер сам является исполнителем, причем не виртуальным, а реальным. Вот и получается, что один формальный исполнитель имитирует работу другого формального исполнителя.
Рассмотрим работу Машины Тьюринга.
Машина Тьюринга представляет собой бесконечную ленту, поделенную на ячейки, и каретку (считывающе-печатающее устройство), которая движется вдоль ленты.
Таким образом Машина Тьюринга формально описывается набором двух алфавитов:
A=
Q=

Каждая ячейка ленты может содержать символ из внешнего алфавита A =
Допустимые действия Машины Тьюринга таковы:
1) записать какой-либо символ внешнего алфавита в ячейку ленты (символ, бывший там до того, затирается)
2) сместиться в соседнюю ячейку
3) сменить состояние на одно из обозначенных символом внутреннего алфавита Q
Машина Тьюринга — это автомат, который управляется таблицей.
Строки в таблице соответствуют символам выбранного алфавита A, а столбцы — состояниям автомата Q =
В каждой клетке таблицы, соответствующей некоторому символу ai и некоторому состоянию qj, находится команда, состоящая из трех частей
· символ из алфавита A
· направление перемещения: «>» (вправо), «
Как написать слово на машине тьюринга

Один из важнейших вопросов современной информатики — существует ли формальный исполнитель, с помощью которого можно имитировать любого формального исполнителя. ответ на этот вопрос был получен почти одновременно двумя выдающимися учеными — А. Тьюрингом и Э. Постом. Предложенные ими исполнители отличались друг от друга, но оказалось, что они могут имитировать друг друга, а главное — имитировать работу любого формального исполнителя.
Что такое формальный исполнитель? Что значит — один формальный исполнитель имитирует работу другого формального исполнителя? Если Вы играли в компьютерные игры — на экране объекты беспрекословно подчиняются командам играющего. Каждый объект обладает набором допустимых команд. В то же время компьютер сам является исполнителем, причем не виртуальным, а реальным. Вот и получается, что один формальный исполнитель имитирует работу другого формального исполнителя.
Рассмотрим работу Машины Тьюринга.
Машина Тьюринга представляет собой бесконечную ленту, поделенную на ячейки, и каретку (считывающе-печатающее устройство), которая движется вдоль ленты.
Таким образом Машина Тьюринга формально описывается набором двух алфавитов:
A=
Q=
Каждая ячейка ленты может содержать символ из внешнего алфавита A =
Допустимые действия Машины Тьюринга таковы:
1) записать какой-либо символ внешнего алфавита в ячейку ленты (символ, бывший там до того, затирается)
2) сместиться в соседнюю ячейку
3) сменить состояние на одно из обозначенных символом внутреннего алфавита Q
Машина Тьюринга — это автомат, который управляется таблицей.
Строки в таблице соответствуют символам выбранного алфавита A, а столбцы — состояниям автомата Q =
В каждой клетке таблицы, соответствующей некоторому символу ai и некоторому состоянию qj, находится команда, состоящая из трех частей
· символ из алфавита A
· направление перемещения: «>» (вправо), «
Машина Тьюринга на шаблонах
Каждый интересующийся шаблонами в С++ скорее всего слышал об их Тьюринг-полноте и связанных с этим шутках про «we put a language in your language, so you can program while you program». В этом посте я расскажу как с помощью шаблонов и константных выражений построить настоящую машину Тьюринга, вычисляющую результат своей работы во время компиляции, на которой можно будет запускать уже существующие программы. Например усердный бобер с 4 состояниями и 2 символами выглядит как-то так:
На выходе, как и положено, получаем
Тут можно посмотреть на код: https://ideone.com/MvBU3Z. Желающие узнать как все устроено внутри, добро пожаловать под кат.
Для полноценной работы машины Тьюринга (МТ далее) нужно следующее:
1. Лента с символами
2. Способ считывать и записывать символы на ленту
3. Способ перемещаться по ленте и расширять ее по мере надобности
4. Система состояний и правил перехода
5. Способ вычислять следующее состояние системы целиком (машина + лента)
6. Способ останавливать выполнение, когда машина достигает финального состояния
Все операции должны выполняться над типами и константными выражениями, а не над переменными как в обычной жизни. Для согласованности со стандартной библиотекой С++, мы будем использовать следующий способ вычислений:
Использование имени «type» для хранения результатов сделает возможным некоторые полезные трюки с std::conditional и std::integral_constant, которые мы увидим в далнейшем.
Что можно сделать с лентой? Можно ее, например, вывести на экран. Функция print будет единственной функцией в обычном понимании, которая будет использоваться в программах для нашей машины.
Здесь используется стандартный трюк с рекурсивным шаблоном. По ссылке можно посмотреть на получившийся код: https://ideone.com/DBHSC6
2. Прежде чем перейти к чтению и записи, необходимо сделать некоторые вспомогательные операции:
С конкатенацией все просто.
Инверсия чуть-чуть посложнее: берем первый символ, переносим его в конец и конкатенируем с перевернутым хвостом. Внутри разворачивается рекурсия в результате которой получается то, что нам нужно. Вот пример запуска: https://ideone.com/47GKNp
Чтение символов — место, где начинается магия со стандартной библиотекой.
Логика на самом деле относительно проста: если n == 0, мы возвращаем первый символ ленты, обернутый в std::integral_constant, в противном случае мы уменьшаем n на единицу и отбрасываем первый символ. Для чего нужна конструкция ::type::type? Первый type относится к std::conditional. std::conditional ::type равняется A, если T == true, и равняется B в остальных случаях. Таким образом, в зависимости от значения n, вся конструкция развернется в одно из следующих выражений:
Разгадка: в первом случае шаблон Read > будет инстанциирован в зависимости от значения n, во втором он будет инстанциирован всегда, так как мы явно используем внутренний alias (::type). Если мы всего лишь упомянем имя шаблона, он не будет инстанциирован, если мы попытаемся использовать что-то из его внутренностей, шаблон будет инстанциирован. Таким образом, выражение из второго примера приведет к бесконечной рекурсии, которая все же остановится, но с ошибкой. Этот примем с ::type::type будет активно использоваться в дальнейшем.
Тут можно посмотреть на пример чтения с ленты: https://ideone.com/vEyASt
Запись. Допустим мы хотим записать на ленту вместо символа х символ y. Операцию записи можно представить как деление всей ленты на часть до х, сам символ х и часть после х, замену x на y и конкатенирование всех частей обратно в целое. Определим операции для вычисления n первых и последних символов:
Чтобы получить n последних символов, будем делать примерно то же, что делали для чтения: укорачивать ленту по одному символу, пока длина оставшегося куска не станет равна n. Чтобы получить первые n символов, перевернем ленту, возьмем последние n символов и перевернем результат. Примеры использования: https://ideone.com/igYF3W.
Наконец, непосредственно запись:
Этот код не сложно понять, зная, что тут на самом деле происходит. Примеры записи: https://ideone.com/w2mUdh
В данный момент мы имеем класс для представления ленты, а также умеем читать и писать символы. Теперь нужно научиться двигать ленту.
3. Наша МТ будет поддерживать следующие операции передвижения: Hold, Left and Right. Каждая из них должна уметь вычислять следующую позицию и следующее состояние ленты, зная текущее ее состояние и позицию. Если машина смотрит на символ в позиции 0 и мы хотим сдвинуть ее влево, ленту необходимо расширить. Аналогично в случае, когда машина смотрит на конечный символ и двигается вправо.
4. Теперь можно переходить к состояниям. Если машина находится в каком-то состоянии и читает символ с ленты, нам нужно знать три вещи: что писать, куда двигаться и в какое состояние перейти. Состояния решено было запрограммировать как группу специализаций шаблонов, где каждая специализация соответствует паре (состояние, символ), то есть правилу перехода. Предположим, мы хотим задать следующее правило: находясь в состоянии A и прочитав символ 0, нужно записать вместо него 1, сдвинуться вправо и перейти в состояние B. Выглядеть это правило будет вот так:
Здесь использована отличная возможность современного С++: alias template. Поля «move» и «next» не просто типы, а шаблоны типов, в дальнейшем они будут использованы МТ для вычисления своего следующего состояния. Писать такую конструкцию для каждого правила довольно утомительно, поэтому обернем задание правил перехода в макрос. Состояние, перейдя в которое машина должна остановиться, назовем Stop.
5. Чтобы удерживать состояние всей системы (состояние машины, ее текущая позиция и состояние ленты), определим класс Machine. Единственное, что должен уметь этот класс — делать один шаг симуляции, вычислять свое следующее состояние.
Сперва мы считываем символ с ленты и сохраняем его как «symbol». Далее мы инстанциируем класс State с конкретным значением символа и получаем правило перехода. Следующее состояние машины определяется следующим образом:
Зачем нужно ключевое слово «template» перед «next»? Согласно стандарту, перед именем вложенного шаблона необходимо писать «template», если это имя используется после оператора разрешения области видимости(«::»). При вычислении операции перемещения можно наблюдать тот же эффект.
Чтобы вычислить следующее состояние ленты, запишем в нее новый символ и по необходимости расширим, последовательно вызвав операции записи и перемещения. Вычисление новой позиции очевидно.
Наконец, все готово, и мы умеем вычислять следующее состояние системы, делать шаги. Можно написать временную вспомогательную функцию для вывода состояния машины, придумать какую-нибудь простую программу и пошагово следить за ее выполнением: https://ideone.com/XuBDry. В этом примере можно наблюдать, как машина движется право и заменяет все на своем пути.
6. Все выглядит так, как будто работает, но мы должны идти глубже: входными данными для процесса являются начальное состояние машины, ее позиция и состояние ленты, в конце мы хотим знать только что случилось с лентой, когда машина достигла состояния Stop. Окей, напишем класс
Чтобы проверить условие остановки, мы инстанциируем текущее состояние машины и состояние Stop со значением 0, после чего сравниваем их между собой посредством std::is_same. Если они равны, возвращаем ленту, в противном случае делам следующий шаг и снова проверяем условие остановки.
Попробуем теперь написать что-нибудь. Например увеличение чисел в бинарном формате. Предположим, что число записано слева направо, как на бумажке.
Решение задач. Машина Тьюринга
«Управление общеобразовательной организацией:
новые тенденции и современные технологии»
Свидетельство и скидка на обучение каждому участнику
Написать программу на машине Тьюринга, прибавляющую число 2 к введенному числу.

Написать на машине Тьюринга программу, прибавляющую 3 к введенному числу.

Перенести первый символ непустого слова P в его конец. Алфавит : A=
Если первый символ – это a, то надо перейти в состояние q2, в котором автомат бежит вправо и записывает в конце a. Если же первым был символ b, тогда надо перейти в состояние q3, где делается всё то же самое, только в конце записывается символ b. Если же первым был символ c, тогда переходим в состояние q4, в котором автомат дописывает за входным словом символ c.

Для решения этой задачи предлагается выполнить следующие действия:
В противном случае уничтожить всё входное слово ( q 7 ).

Запомнить первый символ, стереть второй символ и установить на его месте первый.

Сдвиг символов осуществляется так: в очередной клетке записываем b (если в q 1 ) или c (если в q 2 ), переходим вправо и меняем состояние на q 1 (если в текущей клетке было записано b ) или на q 2 (если было записано c ), где осуществляется дальнейшая запись. Если в очередной клетке записано a или пробел, то записываем в нее запомненный символ и останавливаем программу.



После этого возвращаемся к началу входного слова.

Вначале записываем знак = за входным словом. Затем возвращаемся под первый символ входного слова.
Машина Тьюринга, как модель автоматных программ
Машина Тьюринга, как модель автоматных программ
1. Введение
Программирование нуждается в новых универсальных алгоритмических моделях, а аппаратные средства реализуют алгоритмы не только в другой форме, но и на базе другой алгоритмической модели — автоматной. Заимствование технологии из сферы разработки аппаратных средств ключевая идея автоматного программирования. Однако синтез цифровых устройств отличается от программирования. Но, заимствуя модель, с одной стороны, ее не желательно существенно изменять, а, с другой стороны, нельзя не учитывать уже существующую теорию и практику программирования.
Далее мы рассмотрим SWITCH-технологию проектирования автоматных программ, в которой с подобными процессами сталкиваешься сплошь и рядом. С одной стороны, она так изменила модель конечного автомата, что фактически вывела ее за рамки теории автоматов. А, с другой стороны, вводит в программирование понятия, которые с трудом воспринимаются программистами, а, порой, просто являются лишними, т.к. существуют более привычные аналоги из теории программ и практики программирования.
За основу обсуждения проблем автоматного программирования возьмем недавнюю лекцию Шалыто А.А. [1] и его «программные» статьи к определению парадигмы автоматного программирования [2, 3].
1. Автоматизированные объекты, схемы программ
В лекции достижением автоматного программирования объявлено введение в него понятия автоматизированных объектов управления, заимствованное из теории автоматического управления (ТАУ). Но, напомним, что в ТАУ рассматривают не столько объекты, а системы, среди которых выделяют следующие [4]:
Исходя из этого, правильнее было бы говорить о системах автоматического управления (САУ). Теперь посмотрим на типовую функциональную схему САУ, показанную рис. 1. Если ленту машины Тьюринга считать объектом управления, то исполнительными устройствами (ИсУ) будут элементы МТ, реализующие изменение содержимого ленты и передвигающие головку, а измерительными устройствами (ИзУ) — элементы, читающие информацию с ленты.

Рис.1. Функциональная схема САУ
Но зачем обращаться к ТАУ, если есть более близкая к программированию практика проектирования вычислительных систем, в которой операционные устройства (ОУ), к которым, безусловно, относится и МТ, рассматриваются в виде комбинации операционного (ОА) и управляющего (УА) автоматов. И это ближе к тому, к чему мы в конечном итоге стремимся — обоснованию мощности автоматного программирования. На рис. 2 представлен скрин текста из монографии Майорова С.А., Новикова Г.И. Структура электронных вычислительных машин [5], в которой вопросы проектирования ОУ рассмотрены весьма детально.

Рис.2. Концепция управляющего и операционного автоматов
Но, если сравнивать теорию проектирования ЭВМ и теорию программ, то между ними прослеживается явная структурная аналогия. В теории программирования модель любой программы на структурном уровне можно представить, как схему программы S = (M, A, C), где M – множество элементов памяти, A – множество операторов, C – управление [10]. Следуя этому подходу, любую программу машины Тьюринга также можно определить как схему программы, в которой множество M представлено ячейками ленты, множество операторов – действиями МТ, связанными 1) с анализом ячеек, 2) изменением символов в ячейках ленты и 3) перемещением головки.
Таким образом понятие схемы программы полностью аналогично рассмотренной концепции операционного и управляющего автоматов, где моделью УА является модель рассматриваемого далее структурного конечного автомата (СКА), а ОА «является структурой для выполнения действий над информацией». При этом ОА включает элементы хранения данных (выше – это память) и блоки для обработки информации, реализующих вычисление логических условий и реализацию тех или иных действий (выше – множество операторов).
Из сказанного можно понять, что лента лишь условно может считаться объектом управления для МТ. Хотя бы потому, что устройство управления машины Тьюринга не имеет к ней прямого доступа, т.к. все операции с ячейками реализуют опосредован-но блоки ОА. Кроме того, как представляется, не очень привычно или, если не сказать, странно считать целью управления программы, как системы управления, объект, представляющий собой память (ленту).
Таким образом, для формального определения машины Тьюринга, а в ее контексте места для модели конечного автомата, достаточно понятий теории программ. Теперь, в отличие от весьма расплывчатого определения автоматных программ, данного в рамках SWITCH-технологии, можно сказать, что автоматной программой считается программа, имеющая управление в форме модели конечного автомата.
Какая при этом будет сама программа – с простым или сложным поведением, какова ее «разновидность» – с логическим управлением, «с явным выделением состояний» и т.д. и т.п. не имеет абсолютно значения. Главное – вид управления. Остальные же элементы программы могут определяться в широких пределах – от простейших, как, например, у машины Тьюринга, до самых сложных – любых форм операторов, функций и структур данных языков программирования – ассемблера, языка высокого уровня и т.п.
Можно также вспомнить, что машину Тьюринга уже давно принято считать авто-матом [6] или уж, в крайнем случае, его простым расширением [7]. Но необходимо понимать, что это за автомат, что это за расширение, и эквивалентны ли они моделям классических конечных автоматов. Попробуем это как раз и уточнить.
2. Тьюрингово программирование в среде автоматного программирования
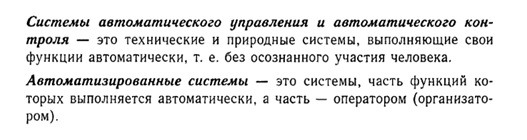
На рис. 3 показан автомат для МТ функции инкремента из монографии [8]. По форме это явно не программа для МТ, но уже и не классический конечный автомат. На рис. 4 приведен граф классического структурного конечного автомата (СКА) и его реализация в среде ВКПа (среда визуально-компонентного автоматного программирования на языке С++ в рамках библиотеки Qt и среды Qt Creator), реализующего тот же самый алгоритм блока управления (БУ) МТ.

Рис.3. Увеличение числа на единицу с помощью машины Тьюринга
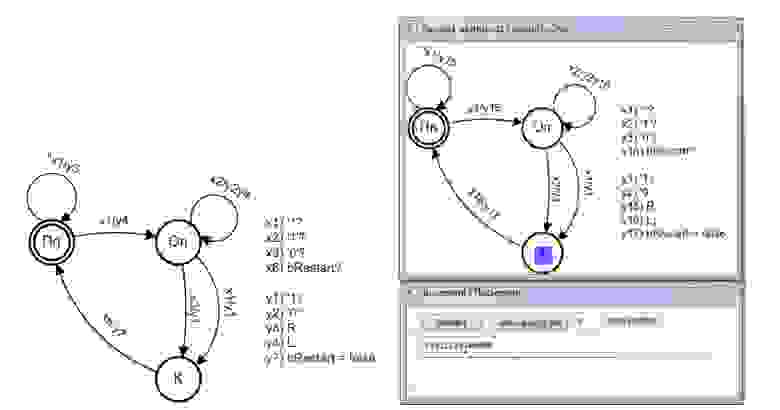
Рис.4 Модель программы инкремента для МТ в форме СКА
Можно видеть, что структурный автомат имеет четыре входных и пять выходных каналов. Каждый из этих каналов связан с одноименной ему программной функцией – предикатом или действием. Здесь предикаты – функции без параметров, возвращающие булевское значение в зависимости от значения обозреваемой ими ячейки ленты, а действия – функции без параметров, выполняющие то или иной действие по изменению ячейки ленты и передвижению головки машины Тьюринга.
Данный СКА имеет то же множество состояний, что и автомат на рис.3. При этом кроме собственно автоматного отображения, представленного СКА, он реализует еще два отображения – отображение множества предикатов (x1, …, xM) на множество одноименных входных каналов автомата, и множество выходных каналов автомата на множество одноименных действий – y1, …, yN. Например, предикат x3 вернет значение true (значение 1 для одноименного входного сигнала), если в текущей ячейке будет символ 1, а действие y4, которое будет запущено, когда одноименный выходной сигнал автомата примет значение 1, будет соответствовать перемещение головки влево (L) и т.д. и т.п.
Обратим внимание, что СКА не управляет напрямую лентой, а реализует [дополнительные] отображения, связывая сигналы автомата с функциями, определяющими множество операций машины Тьюринга. Это еще раз убеждает, что нет необходимости вводить понятие автоматизированного объекта управления в ситуации, когда достаточно «старомодного», но математически строго понятия отображение.
Сравнивая автоматы на рис. 3 и рис. 4, можно видеть, что СКА не использует команду «*» (см. рис. 1). В подобной ситуации ему достаточно не выдавать сигнал, связанный с данной командой. Кроме того, два и более сигналов (как входных, так и выходных) на одном переходе параллельны. Поэтому, когда возникает конфликт доступа к общим объектам (например, необходимо изменить ячейку и переместить головку) используется соглашение: действия на одном переходе исполняются последовательно в порядке следования их номеров, т.е. действие с большим номером выполняется после действия с меньшим номером. Это соглашение не распространяется на предикаты, т.к. они не изменяют ленту. Так мы делаем автомат более компактным и наглядным (не на-до вводить промежуточные состояния).
В процессе тестирования программы инкремента были выявлены ситуации, когда в процессе работы МТ могут возникнуть проблемы. Во-первых, реальная лента не бесконечна и выход за ее пределы может вызвать «крах» программы. Во-вторых, нужно обязательно указывать начальное положение головки. Без этого, если, например, число находится в произвольном месте ленты, а начальное состояние головки слева от числа и напротив пробела, то головка сразу начнет движение влево. Далее она может выйти за границы ленты, вызвав «крах» программы, или, переместившись, на шаг влево запишет в ячейку 1 и, зависнув, завершит «успешно» работу. Или, если число содержит во всех разрядах 1 и записано с начала ленты, то заключительная попытка переноса 1 в старший разряд вызовет тот же самый «крах».
2.1. Объектная реализация МТ на языке С++
Рассмотрим объектную программную реализацию машины Тьюринга на языке C++ в среде ВКПа, реализующую любую программу для МТ, в том числе и программу вычисления инкремента.
С этой целью создан базовый класс, представляющий любую машину Тьюринга, который и наследуют программные объекты, реализующие ту или иную программу МТ. Данный базовый представлен на листинге 1, а программа, реализующая задачу инкремента, на листинге 2.
Листинг 1. Программная реализация базового класса МТ
Листинг 2. Программа инкремента для машины Тьюринга
2.2. Примеры программ для МТ с реализацией на С++
Рассмотрим пример программы для МТ, которая «выступает как акцептор языка, т.е. она может распознавать язык» из [9]. Ее функция переходов представлена на рис. 5, а эквивалентный ей автомат в форме СКА на рис. 6.
Рис. 5. Функция переходов машины Тьюринга, распознающая язык

Рис. 6. Граф СКА машины Тьюринга, распознающей язык
Блок управления МТ в форме СКА имеет 6 входных и 7 выходных каналов. Про-грамма акцептора включает также соответствующее им число предикатов и действий, которые представлены на рисунке справа от графа автомата. Реализация программы на С++ в среде ВКПа представлена на листинге 3.
Листинг 3. Программа для машины Тьюринга, распознающей язык
На листинге 3 действие y18 представляет вариант программы для МТ в соответствии с подходом SWITCH-технологии. В рамках реализации автоматного программирования среды ВКПа в этом случае вместо автомата на рис. 6 необходимо будет реализовать автомат с одним состоянием, который выдает в цикле сигнал y18. Ему соответствует закомментированная строка таблицы переходов на листинге 3. Для работы автомата по типу SWICH необходимо снять комментарий с данной строки, а остальные строки закомментировать.
Рассмотрим еще один пример программы для машины Тьюринга из [7], где МТ определяется, как «весьма простое расширение модели конечного автомата». В этом случае программа для машины Тьюринга представляет собой конечный список пятерок частично-определенной функции переходов и выходов δ: S×XS×X×Г.
Программа для МТ, находящая наибольший общий делитель (НОД) двух чисел, показана на рис. 7. Эквивалентный ей граф СКА представлен на рис. 8. Заметим, что и здесь не используются команда перезаписи символов. Реализация на С++ представлен листингом 4.

Рис. 7. Граф переходов машины Тьюринга, вычисляющей НОД двух чисел, и несколько ее конфигураций при обработке пары чисел
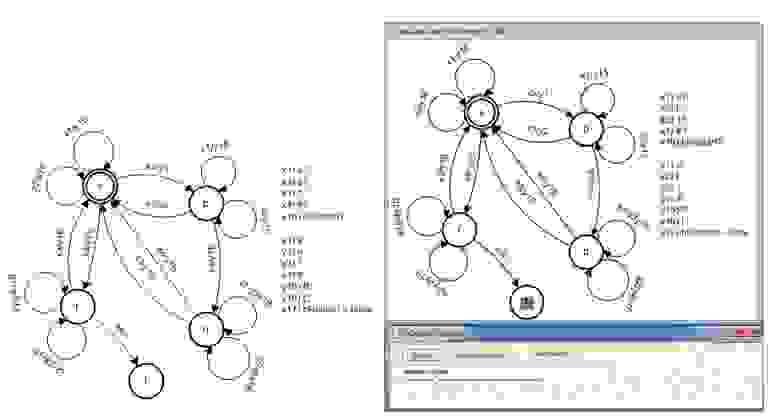
Рис. 8. Граф СКА, эквивалентный графу на рис. 7
Листинг 4. Программа для машины Тьюринга нахождения НОД двух чисел
В заключение еще одна программа для МТ от разработчиков SWITH-технологии, рассмотренная в статье [11], где приведена задача распознавание скобок в двух варианта. Один в форме автомата Мили, второй – смешанный автомат (соответственно на рис. 9 и рис. 11). Соответствующие им структурные автоматы приведены на рис. 10 и рис. 12. Реализацию программы на С++ демонстрирует листинг 5.

Рис. 9. Распознавание скобок произвольной глубины. Граф переходов Мили
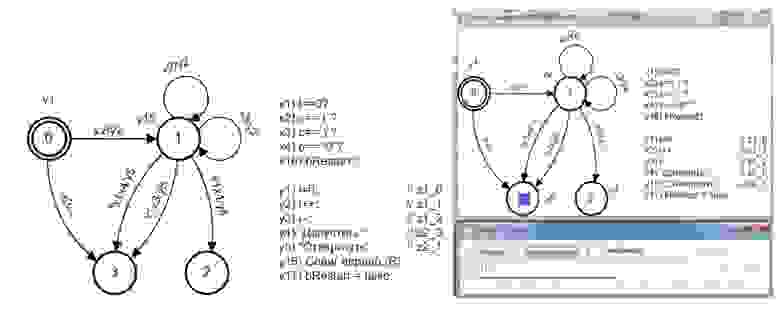
Рис. 10. Распознавание скобок произвольной глубины. Граф СКА Мили
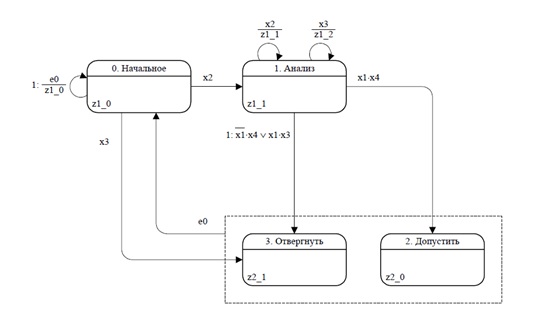
Рис. 11. Распознавание скобок произвольной глубины. Граф переходов смешанного автомата

Рис. 12. Распознавание скобок произвольной глубины. Граф СКА переходов сме-шанного автомата
Листинг 5. Программа для машины Тьюринга распознавания вложенности скобок
Поскольку автомат на рис. 12 отказался работать, то было решено перейти к автомату на рис. 9. Эквивалентный ему автомат в форме СКА, показан на рис. 10. Правда, формально это тоже смешанный автомат, у которого от первой реализации (рис. 12) был оставлен сигнал при состоянии «0» и сигнал y15 при состоянии «1». Первый необходим при начальной установке, а сигнал y15 реализует смещение головки вправо в целях чтения очередного символа ленты. В остальном СКА соответствует автомату Мили на рис. 9.
После того, как автомат на рис. 10 был успешно протестирован, вернулись к автомату на рис. 11. И стало понятно, что у него лишним является сигнал z1_1 при состоянии «1»(у автомата на рис. 12 это сигнал y2). Проблема в том, что он, обнаружив «левую скобку», наращивает счетчик на две единица, а при обнаружении «левой скобки» не изменяет его совсем. Так, при обнаружении «левой скобки» он вызывается дважды – один раз на петле,, помеченной x2/y2, а второй раз при входе в состояние. А при обнаружении «правой скобки» счетчик сначала на петле уменьшается, а затем при входе в состояние увеличивается.
Причина такой работы управления МТ, в неверной трактовке авторами функционирования автомата типа Мура. Видимо, они полагают, что сигнал при состоянии у автомата Мура исполняется только при входе в это состояние (см. переход из состояния «0» в «1»), а на самом деле он выдается всякий раз при входе в это состояние. В том числе и при переходе по петле. Таким образом, мы имеет дело не с ошибкой (кто не ошибался?), а с более серьезной проблемой — неверной трактовкой в рамках SWITH-технологии функционирования автоматов типа Мура. Тестирование эквивалентной модели это и показало.
Подводя итог, можно сказать, что нет формальных отличий тьюрингового программирования от автоматного, т.к. машина Тьюринга – это абстрактная модель автоматных программ. Просто в последнем случае используется более широкий набор операторов и структур данных (памяти). Теперь можно уверенно ответить и на вопрос, чем отличается машина Поста, как модель обычных программ, от машины Тьюринга — модели автоматных программ. Моделью управления и лишь только ею, т.к. остальное – память и операторы могут быть одними и теми же.
Следовательно, обычное программирование отличается от программирования автоматного только одним – моделью управления. Таким образом, пока для реализации автоматов используются обычные операторы управления типа switch и им подобные нельзя, строго говоря, такое программирование считать автоматным. Это может быть имитация автоматов с утратой их определенных свойств и не более того.
Итак, давая определение понятий автоматной программы и автоматного программирования, говорить надо не об «автоматизированных объектах управления», а о программах и только программах, имеющих управление в форме классического конечного автомата.
И еще интересный факт, на который хотелось бы обратить внимание. В начале 2000-х годов, авторы озвучили свое понимание автоматного программирования на широкую аудиторию. Их статьи по поводу абстрактных машин были напечатаны в журнале «Мир ПК» №2 за 2002 г. [11, 12, 13]. Можно утверждать, что годы на убеждения сторон не повлияли. Хотя, возможно, это отражает только степень их уверенности в выбранных решениях.
Например, в «новую лекцию по автоматному программированию» Шалыто А.А. по сравнению с предыдущей «лекцией со слайдами» (десятилетней давности) добавлено лишь видео примера на базе «автоматного пакета» Stateflow. Казалось бы, это подтверждает правоту идей Шалыто А.А., т.к. то, что не удалось реализовать в рамках UniMod (проект, похоже, «заморожен»), воплотили разработчики Stateflow. И, наверное, не так уж важно кто это сделал…
Однако, на момент публикации упомянутых статей авторам SWITCH-технологии уже была известна критика в ее адрес. Это не было тайной, т.к. с ней можно было ознакомиться на сайте SoftCraft [14]. На нем же были созданы разделы, посвященные автоматному программированию вообще и SWITH-технологии и КА-технологии в частности. Позиции авторов обсуждались на форуме сайта (он был на тот момент открыт). Но все так и остались при своем мнении.
Итоги на текущий момент таковы. Критика, высказанная в отношении SWITH-технологии когда-то давно, актуальна и на текущий момент. Она же относится и к пакету Stateflow. В SWITH-технологии как не было, так и нет четкого определения автоматного программирования, не изменился подход к реализации автоматов, сама модель не является классической, нет модели параллельных вычислений и т.д. и т.п. Без устранения этих проблем подобное автоматное программирование в лучшем случае претендует на достаточно ограниченную роль.
Причины отмеченных выше проблем довольно ясны: игнорируется теория программ, забыта теория автоматов, хотя о самих автоматах и об их замечательных свойствах сказано много хороших и правильных слов. Но по факту это другие автоматы. Автор убежден в сомнительности непродуманных попыток создавать оригинальные модели. Речь о синхронных, реактивных и других моделях. Они могут быть удобны при решении узкого класса задач и не более того. Но серьезнее то, что они выпадают из теории автоматов, не имея при этом собственной теории. А модель вне теории беспомощна, а потому фактически бессмысленна.