Драйвер — это просто
Многие считают что самому создать драйвер для Windows это что-то на грани фантастики. Но на самом деле это не так. Конечно, разработка драйвера для какого-то навороченного девайса бывает не простой задачей. Но ведь тоже самое можно сказать про создание сложных программ или игр. В разработке простого драйвера нет ничего сложного и я попытаюсь на примерах это показать.
Сперва нам нужно определится в чем мы же будем создавать наш первый драйвер. Поскольку материал ориентирован на новичков, то язык программирования был выбран один из простых, и это не Си или ассемблер, а бейсик. Будем использовать один из диалектов бейсика — PureBasic. Из коробки он не обучен создавать драйверы, но у него удачный набор файлов, используемых для компиляции и небольшое шаманство позволяет добавить эту возможность. Процесс компиляции состоит из нескольких этапов. Если кратко, то он происходит следующим образом: Сначала транслятор «перегоняет» basic-код в ассемблер, который отдается FASM’у (компилятор ассемблера), который создает объектный файл. Далее в дело вступает линкер polink, создающий исполняемый файл. Как компилятор ассемблера, так и линкер могут создавать драйверы и если немного изменить опции компиляции, то получим не исполняемый файл, типа EXE или DLL, а драйвер режима ядра (SYS).
Скачать немного модифицированную бесплатную демо версию PureBasic 4.61 x86 можно на файлопомойке, зеркало.
Если нужно создать драйвер для x64 системы, качайте эту версию, зеркало.
Дистрибутивы имеют небольшие размеры, около 3 МБ каждый. С помощью этой версии можно создавать только драйвера.
Скачиваем, распаковываем и запускаем, кликнув по файлу «PureBasic Portable». При этом запустится IDE и вылезет окошко с сообщением что это демо-версия и списком ограничений. Из него наиболее существенным является ограничение числа строк кода, равное 800, а для создания простых драйверов этого может хватить. Остальные ограничения в нашем случае, не существенны.
Окно IDE с загруженным кодом драйвера показано на скрине.

Компиляция драйвера выполняется через меню «Компилятор» (это если кто не понял).
Теперь определимся что будет делать наш первый драйвер. Обычно при изучении программирования начинают с простых вещей, скажем, выполнения математических операций и вывода результата. Вот пусть наш драйвер делает тоже самое, ведь банальная математика производимая в режиме ядра это очень круто!
Может показаться что это куча бессмысленного кода, но это не так.
У каждого драйвера должна быть точка входа, обычно у нее имя DriverEntry() и выполнена она в виде процедуры или функции. Как видите, в этом драйвере есть такая процедура. Если посмотрите на начало кода, то в первых строках увидите как ей передается управление. В этой процедуре происходит инициализация драйвера. Там же назначается процедура завершения работы драйвера, которая в нашем случае имеет имя UnloadDriver(). Процедуры CreateDispatch() и CloseDispatch() назначаются обработчиками соединения и отсоединения проги из юзермода.
Процедура DeviceIoControl() будет обрабатывать запросы WinAPI функции DeviceIoControl(), являющейся в данном драйвере связью с юзермодом. В конце кода расположена так называемая ДатаСекция (DataSection), в которой находятся имена драйвера, сохраненные в формате юникода (для этого использована одна из фишек ассемблера FASM).
Теперь рассмотрим как драйвер будет взаимодействовать с внешним миром. Это происходит в процедуре DeviceIoControl(). В ней отслеживается одно сообщение, а именно — #IOCTL_MyPlus, которое отправляет юзермодная прога, когда ей нужно сложить два числа в режиме ядра (круто звучит, правда?). Когда такое сообщение получено, то считываем из системного буфера, адрес указателя на структуру со слагаемыми, производим сложение и результат помещаем в системный буфер. Собственно это основная задача нашего первого драйвера.
Видите сколько понадобилось кода для выполнения простейшей математической операции — сложения двух чисел?
А теперь рассмотрим программу, работающую с этим драйвером. Она написана на том же PureBasic.
При старте программы вызывается функция OpenDriver(), которая загружает драйвер. Для упрощения, имя драйвера, имя службы и описание службы заданы одинаковыми — «pbDrPlus». Если загрузка неудачная, то выводится соответствующее сообщение и программа завершает свою работу.
Процедура Plus() осуществляет связь с драйвером. Ей передаются хэндл, доступа к драйверу и слагаемые числа, которые помещаются в структуру и указатель на указатель которой, передается драйверу. Результат сложения чисел будет в переменной «Result».
Далее следует код простейшего GUI калькулятора, скопированного из википедии.
Когда закроют окно, то перед завершением работы программы, закрывается связь с драйвером и производится его деинсталляция из системы.
Результат сложения чисел 8 и 2 на скриншоте.
Исходные коды драйвера и программы, можно найти в папке «Examples», PureBasic на файлопомойке, ссылку на который давал в начале статьи. Там так же найдете примеры драйвера прямого доступа к порам компа и пример работы с памятью ядра.
PS.
Помните, работа в ядре чревата мелкими неожиданностями аля, BSOD (синий экран смерти), поэтому экспериментируйте осторожно и обязательно всё сохраняйте перед запуском драйвера.
За возможную потерю данных, я ответственности не несу!
Как написать драйвер для принтера
1. Создание директории проекта
Установив DDK, на Вашем компьютере в директории C:\WINDDK\2600.1106\ должны появиться файлы DDK. В этой директории создадим папку, в которой будут храниться наши проекты. Назовем ее, например, MyDrivers.
2. Подготовка файлов проекта
В папке FirstDriver создайте пустой текстовый файл и переименуйте его под именем FirstDriver.c
При попытке переименовки со сменой расширения файла, появляется следующее предупреждение:
Не обращаем внимания на это предупреждение, и нажимаем Да. При этом наш файл примет вид:
Теперь нам надо добавить еще два очень важных файла в наш проект, без которых драйвер нам не сделать. Они называются makefile и sources (обратите внимание, у них нет расширения). Их можно создать самим, но мы сделаем проще: скопируем готовые из какого либо примера проекта драйвера из DDK. Например, возьмем их из C:\WINDDK\2600.1106\src\general\cancel\sys\. Итак, копируем из указанной директории эти два файла и вставляем их в нашу папку проекта FirstDriver. Эти файлы управляют процессрм компиляции драйвера. Файл makefile оставляем без изменений, а вот sources надо подредактировать.
Открываем этот файл с помощью блокнота, и удаляем из него все что там есть и вставляем туда текст, представленный ниже. Сохранияем файл.
Первым параметром идет TARGETNAME, которому мы присвоили Port. Это значит, что когда DDK откомпилирует наш код и создаст драйвер, имя этого файла будет Port.sys Следующем параметром идет TARGETPATH, которому мы указали путь к папке нашего проекта. Если Вы устанавливали DDK в другое место, или создали пупку проекта в другой директории, здесь Вам надо это поправить на тот путь, который у Вас. Параметр TARGETTYPE пока оставлю без комментариев. В параметре SOURCES указываем, из каких файлов будет компилироваться драйвер. У нас это файл FirstDriver.c, вот мы его и указали.
Написание драйвера в подробностях №1


Скоро здесь, возможно, будет стоять твоё имя.
1) Способ работы с драйверами как файлами (подробнее см. ниже)
2) Драйвер, как легко заменяемая честь ОС (учитывая уже сказанные выше примечания)
3) Существование режима ядра
Теперь касательно первого пункта. Это значит,
что функции, используемые при взаимодействии с файлами,
как и с драйверами, практически идентичные (имеется в виду лексически):
open, close, read и т.д. И напоследок стоит отметить идентичность механизма
IOCTL (Input/Output Control Code-код управления вводом-выводом)
-запросов.
Ну и напоследок разъясним ещё несколько терминов:
Ну вот, пожалуй, и хватит терминов. В будущем,
если нужны будут какие-нибудь уточнения по теме,
я обязательно их укажу. А теперь, раз уж эта статья
теоретическая, давай-ка взглянем на архитектуру Windows NT с высоты птичьего полёта.
Краткий экскурс в архитектуру Windows NT

1) System Service Interface (Интерфейс системных служб )
2) Configuration Manager (Менеджер конфигурирования)
3) I/O Manager (Диспетчер ввода-вывода,ДВВ)
4) Virtual Memory Manager,VMM (Менеджер виртуальной памяти)
5) Local Procedure Call,LPC (Локальный процедурный вызов )
6) Process Manager (Диспетчер процессов)
7) Object Manager (Менеджер объектов)
Теперь можно поговорить о сторонних утилитах. Некоторые уже включены в стандартную поставку
Windows: редактор реестра. Но их в любом случае не хватит. Надо будем инсталлить отдельно.
Множество наиполезнейших утилит создали патриархи системного кодинга в
Windows: Марк Руссинович, Гарри Нэббет, Свен Шрайбер. и т.д. Вот о них и поговорим.
Марк Руссинович создал много полезных утилит:
RegMon, FileMon (мониторы обращений к реестру и файлам соответственно), WinObj (средство просмотра директорий имен
объектов), DebugView,DebugPrint (программы просмотра, сохранения и т.д. отладочных сообщения) и проч. и проч. Все эти утилиты и огромное количество других можно найти на знаменитом сайте Руссиновича
http://www.sysinternals.com.
Напоследок нельзя не упомянуть такие хорошие проги, как PE
Explorer, PE Browse Professional Explorer, и такие незаменимые, как дизассемблер IDA и лучший отладчик всех времён и народов SoftICE.
Создание собственных драйверов под Linux

Многие мои друзья и знакомые крутят пальцем у виска или задаются вопросом: не жмёт ли мне череп, когда узнают, что я пишу драйвера под Linux. Слово “драйвер” окутано каким-то почти мистическим смыслом, и постичь Дао его написания способны лишь избранные гуру.
К счастью это не так. Не знаю, как обстоят дела с написанием драйверов под другие операционные системы, в т.ч. и наиболее популярные, но под linux, вне зависимости от аппаратной архитектуры драйвера пишутся очень просто. Для написания драйвера необходимы базовые знания языка си, представление о работе ОС линукс (базовые), понимание того, что мы хотим получить, желание чтения документации и исходных кодов, ну и усидчивость. Всё.
Вы хотите посмотреть как написать драйвер для своего устройства? Тогда ныряйте под кат!
Лёгкость написания драйверов объясняется тем, что исходный код linux великолепно задокументирован и доступен в исходниках, в сети множество примеров и куча литературы. А для создания драйвера вам нужен только любимый дистрибутив и исходники ядра, ну и компилятор под нужную вам архитектуру. Свой первый, не учебный, драйвер я писал для процессора PowerPC 8360, он взаимодействовал с микросхемой ПЛИС и осуществлял сброс настроек по умолчанию. Как это ни странно звучит, я его сделал, немного переписав драйвер SPI для этой архитектуры. Я это говорю к тому, что единая стандартизация написания программ в ядре Linux позволяет проводить такие штуки.
Настольная книга разработчика драйверов под Linux — это “Linux Device Drivers”. Книжка является исчерпывающим руководством по разработке и если что-то не хватает в книге, то это точно можно найти самостоятельно в исходниках ядра. Разумеется, данный пост не претендует на то, чтобы заменить эту замечательную книгу. Более того, написан он по мотивам прочтения оных трудов, но всё же не является кратким пересказом данной книги. Автор этих строк ставит собой цель заинтересовать читателя простотой и изяществом ОС Linux, и понизить порог вхождения людей в разработку драйверов. Поверьте — это очень просто!
То, для чего будем писать драйвер
Поскольку основная цель данной статьи — написание драйверов, железу мы уделим минимум внимания. Я надеюсь все дружат с паяльником, а те кто не дружат — настало время начать дружить, я кратко расскажу, что и как делалось.
Мы будем писать драйвер для дисплея семейства HD44780 подключённого через LPT-порт к компьютеру. Знаю, что порт древний, а типу дисплеев лет не меньше, чем мне, но всё же — это красивый и простой пример написания драйверов под linux, не углубляясь в аппаратные подробности. И тем более, что переделать этот драйвер для этого экрана для других архитектур будет делом замены одной строчки!
Итак, нам понадобится LPT-порт; шнурок для старого принтера и опционально разъём CENTRONICS на 36 контактов, хотя можно просто распатронить кабель; разумеется экран семейства HD44780, самое лучшее — это минимум 4х40 символов, хотя подойдут даже самые маленькие; ну и переменный резистор на 10 кОм, для регулировки контраста. Поскольку LPT-порта у меня нет уже давным-давно, я прикупил первую попавшуюся плату на PCI (можно и PCI-E). Причём плата попалась на столько китайская, что я даже не смог найти никакой документации по напаянному чипу на ней. Ничего, будем ещё и реверсить её :)))).

Аппаратные исходники
Будем считать, что достать эти компоненты не составило труда, и ваши руки горят от нетерпения всё сделать.
Предупреждение.
Внимательно прочитать!

Хочу обозначить, что мы работаем в самых тяжёлых условиях, с железом, да ещё и будем работать на уровне ядра. Живём, так сказать, внутри пациента. Любая ошибка в программе и ядро падает. При чём оно может даже не успеть помахать вам kernel_panic-ом, просто внезапно всё перестаёт работать. Обратите внимание, что вы запустили драйвер, выгрузили его, и вдруг начались неявные глюки — всё, ваш путь — перезагрузка. Если система жива, то командой reboot. Если уже нет, то аппаратный reset. Хотя при тяжёлых случаях иногда система может сама себя перезагрузить.
Плюс, если вы не знаете что делаете (пишете в порт, обращаетесь к областям памяти и т.п.), то лучше этого не делать. Ибо всё это в лучшем случае может сбить настройки (записанное неверное значение в порт 70h раньше сбрасывало BIOS в х86) или даже попортить оборудование (например посадив ножку GPIO на землю). Поэтому чётко понимайте что вы делаете, как на аппаратном, так на программном уровне!
Приступаем
Для счастливых обладателей встроенного lpt-порта в своём компьютере скажу, что в вашем случае порт живёт по стандартному адресу 378h. Меня можно среди ночи разбудить и я скажу эту цифру, столько с ней связанно. Но ныне нам дали вражескую плату, и нам предстоит её победить!
Вставляем плату в слот PCI или PCI-E, загружаемся и смотрим что у нас происходит на шине PCI следующей командой:
Как видим линух нашёл что-то на шине PCI, и даже попытался дать ему какой-то левый, явно неправильный драйвер. Но нас более всего интересует адреса, на которых сидит данный порт. Это строки: I/O ports, а именно цифры c030h и c020h.
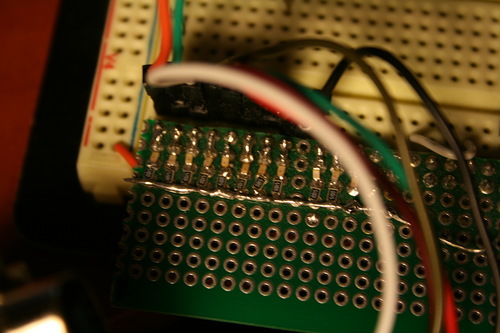
Нам теперь нужно найти какие же адреса за что отвечают. Для этого к порту вывода подключим светодиоды с резисторами примерно по такой схеме (резисторы примерно 310 Ом, или больше или меньше, не важно)
Схема проверки
Поскольку у меня уже есть заготовка светодиодов для теста такого рода, то я вставлял провода прямо в разъем CENTRONICS и у меня не влезло все 8 штук проводов, поэтому вставил только 6 (первые 4 и последние два).

Собранный тестер порта
И набросаем небольшую программку для проверки.
Для работы с портом я взял пример отсюда www.faqs.org/docs/Linux-mini/IO-Port-Programming.html#s9. Единственное, что надо исправить строку:
Делаем нормальные задержки в секунду (вместо usleep(100000);
, пишем sleep(1);) и делаем последовательно три вывода в порт:
Дефайн #define BASEPORT меняем на порт 0xc030. Компилируем, запускаем из под рута: светодиоды не горят. Меняем на другую цифру — 0xc020 — але оп:
Нуль

На выводах AAh
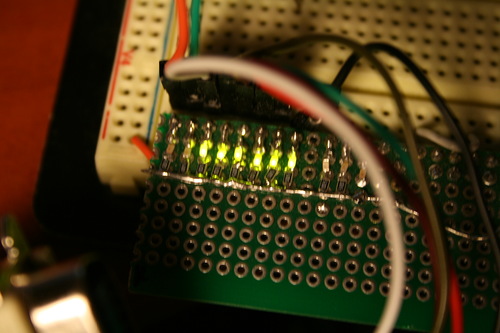
И, разумеется через секунду FFh
Результат налицо. Т.е. с нумерацией портов мы угадали, можно приступать к дровам. LPT-порт данной платы живёт по адресу. 0Xc020!
Хочу обратить внимание программистов-жестянщиков на магическое число 0xAA — это последовательность единиц и нулей. Вот так: 10101010b. Это очень удобно для всяких отладок. А вообще всякий кто работает с железом должен легко в уме переводить двоичное, десятичное, шестнадцатеричное туда-сюда-обратно.
Таки дисплей
Барабанная дробь, настало время собрать железку воедино! Для этого нам осталось всё спаять вместе. Всё собираем по следующей схеме.
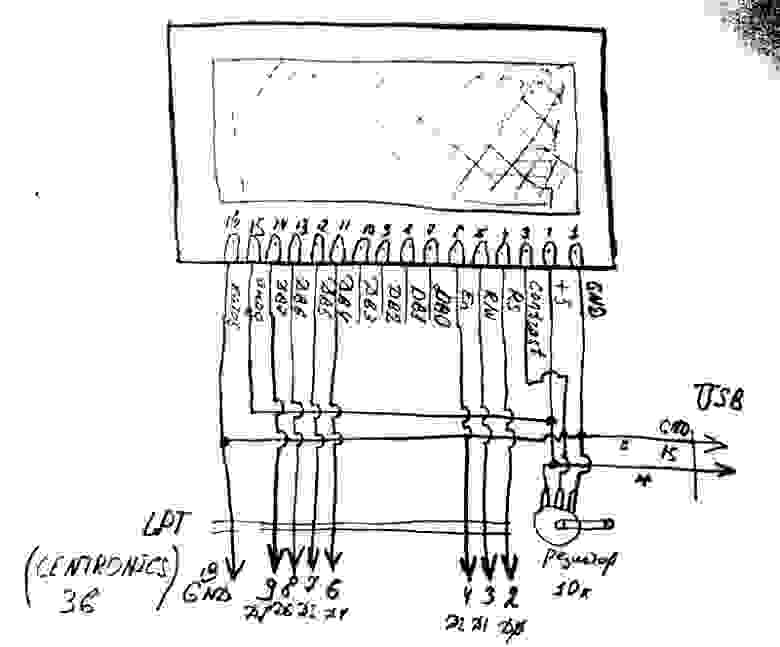
Знаю, что схема не по ГОСТу, но это и не журнал «Радио»
Для питания экрана я распатронил провод USB, и сейчас у меня к экрану идут два провода. Есть хитрый вариант, просто до него никак не доходят руки — это пустить питание USB прямо в проводе LPT, отпаяв один из многочисленных земляных проводов. Как дойдут руки — обязательно сделаю. Допишу только эту статью :)))).
В результате, после подачи питания, мы должны получить что-то вроде этого. Подрегулируйте яркость резистором, чтобы появились две полоски. Они свидетельствуют нам о том, что дисплей не проинициализирован.
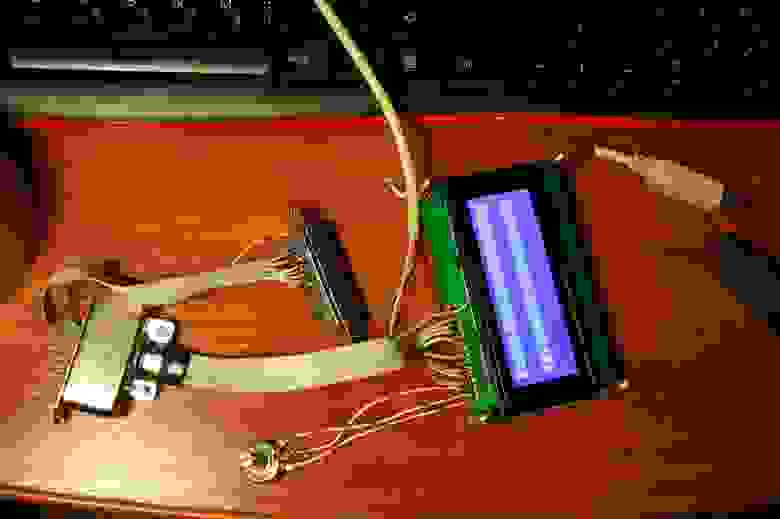
Девайс в сборе
Фух, с аппаратной частью мы закончили, пришла пора переходить к программе.
Приступаем злобным опытам с экраном в программе
В качестве готовой либы для работы с дисплеем использовал код от Arduino взятый отсюда. Я тоже не люблю эту платформу, но код годный для дисплеев, подключаемых по I2C. Если последнее слово вам ни о чём не говорит, не пугайтесь. Суть такова, что тот же самый дисплей подключён по двум проводам (как следует из названия шины), а далее там стоит регистр, который снова преобразует переданный байт в параллельную шину, прям как у нашего LPT-порта. В результате выкинув часть работы с I2C, получим годную либу.
Для чистоты переписал на сях, добавил парочку нужных функций, переименовал некоторые конфликтные, сделал ещё какие-то изменения (не помню, много воды утекло) и получил конфетку.
К слову сказать код использовался на STM32, так же с дисплеями подключающимися по I2C. А теперь мы его портируем уже на х86 да под linux. Вот она — великая сила переносимости кода! Потратив всего 10 минут, чтобы код адаптировать уже под новую платформу.
Работа с портом осуществляется в одной единственной функции — это непереносимый узел, и в зависимости от платформы способ вывода следует менять. Тут был вывод по I2C:
Обратите внимание на эту функцию. Заменив её, код можно запустить в AVR, STM32, MIPS и т. д.
Уже знакомый нам вывод в порт. Дефайн порта определяем в хедере lcd.h. Всё, теперь можно попробовать сделать вывод. Программа стала ещё проще и нагляднее.
Для вывода на экран используется функция-обёртка print_to_string
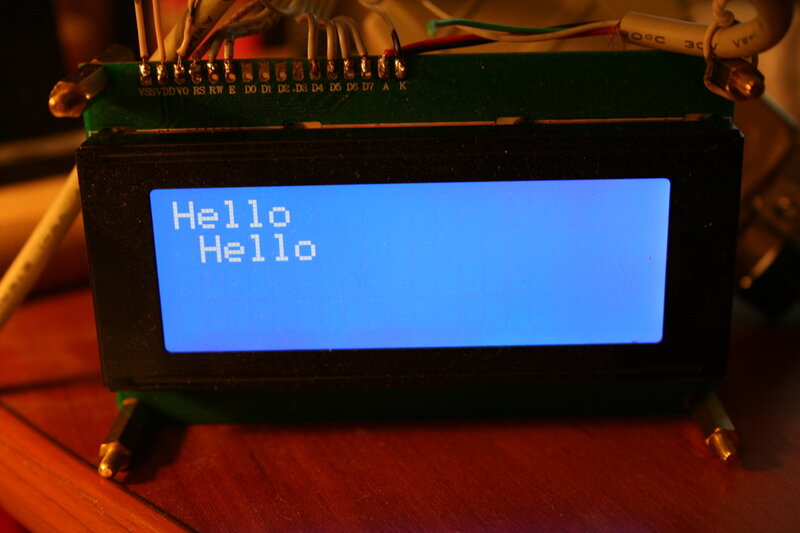
Первый параметр номер столбца (от нуля до 19), второй номер строки (от нуля до трёх), третий — указатель на символьную строку и последний — длина строки. Строка не проверяется на окончание “\0”, длину надо контролировать самостоятельно! В результате попробуем дисплейчик:
В результате на экране должно появится что-то типа этого:

Наш первый дебют!
На этом можно было бы остановиться, т.к. с данным примером можно выводить любые символы, загружать шрифты и т.п. Но, не в качестве драйвера. Хотя можно переделать в демон или как-то ещё, насколько позволит фантазия.
Поэтому, для тех кому стало скучно читать дальше, полную версию этого примера выкладываю тут.
Наша глобальная цель — драйвер устройства, поэтому к нему и приступим.
Инструментарий для сборки драйвера
Чтобы приступить к написанию драйвера, надо поставить необходимый инструментарий. Как подготовить инструментарий для Ubuntu и Debian хорошо рассказывается вот в этой статье blog.markloiseau.com/2012/04/hello-world-loadable-kernel-module-tutorial
Лишь кратко скажу, что если вам не нужно собирать debian-пакеты, а вы пишете модуль только для себя, то достаточно будет установить необходимые компоненты следующей командой:
Всячески рекомендую так же скачать исходные тексты своего ядра. Есть два варианта это сделать. Первый, и очевидный, но возможно слегка геморройный — это узнать версию своего ядра командой:
и скачать его с www.kernel.org. Я же лентяй лазать по ссылкам и искать версию ядра, доверю это дело автоматике.
Усё, запомните этот путь или добавьте ссылку на него, например /usr/src/linux, но не рекомендую это делать, т.к. ядра имеют тенденцию к обновлению. Тут вопрос спорный быть или не быть, решайте сами.
Теперь вы имеете у себя настоящее сокровище: кладезь актуальный документации и чудовищное количество примеров исходного кода и разумеется необходимый плацдарм для сборки модуля.
Настоятельнейше рекомендую лазать в папочку Documents, drivers и прочие, просматривать исходные тексты — это невероятно полезно!
Собстна драйвер
Если вы думаете, что мы сейчас просто поправим мейкфайл и получим готовый драйвер, то вы глубоко заблуждаетесь. Всё, теперь мы находимся в другом мире: не в пространстве пользователя, в пространстве ядра. И тут действуют совсем другие правила.
Чтобы осознать всю бедовость ситуации, то вы должны понимать, что ядро — это одна большая-пребольшая программа. А это означает, что глобальные переменные, функции и т.п. могут быть доступны в других местах ядра! Поэтому ВСЕ глобальные переменные (их следует избегать по максимуму) должны быть объявлены как static!
Мы не будем пересобирать ядро, встраивая в него драйвер, и каждый раз перезапускаться, пробуя его. Это конечно забавно, но очень долго. Вместо этого, мы сделаем модуль ядра, который мы будем загружать и выгружать прямо во время работы.
В нашем будущем модуле, по сравнении с программой для пространства пользователя, изменения будут не очень значительные. Во первых, перенесём все сишные файлы в один, чтобы не иметь проблем с компиляцией (ну или инклудим сишники в друг друга). Хедер оставляем, но чётко определяем все параметры функций (если никаких параметров, то надо прописать void). Вспоминаем, что мы в пространстве ядра, и все библиотеки у нас другие. Меняем все хидеры на ядерные:
Обратите внимание, что даже unistd.h и io.h стали ядерными.
В качестве первичной основы драйвера возьмём модуль hello world. Поправим функцию init:
Здесь всё практически без изменений. Меняется у нас функция работы с железом (самая платформозависимая), т.к. будет работать уже с ядерной функцией вывода в порт:
И, как это ни странно, функция задержек. Вообще задержки — отдельная песня, которой можно посвятить целую статью. У нас же должно быть всё быстро, и как можно меньше занимать ядро на всякую ерунду. Но всё же:
Объяснение такой махинации простое: udelay внутри ядра не может принимать значения больше тысячи. Чтобы избежать казусов, необходима такая заглушка.
После этого собираем примерно таким мейкфайлом:
И загружаем модуль в систему следующей командой:
Если мы всё сделали правильно, то нам не будет выведено ошибок, а экран верно проинициализируется и dmesg покажет последней строкой сообщение вашего модуля:
[10036.950566] Lpt module init
Выгрузить модуль можно командой
[10077.176714] Cleaning up module
Вообще, чтобы не жать постоянно dmesg существует скрипт существует решение, которое мне подсказал камрад Jtu:
Или, если вы используете дистрибутив отличный от Ubuntu, то следует исполнять это под root, и убрать sudo.
Результат на экране:

Привет вам!
Если вы всё это увидели — поздравляю, это ваш первый рабочий бесполезный модуль ядра, который выводит надпись на экран! Это конечно занимательно, но надо таки превращать наши эксперименты в нормальный драйвер, с которым можно работать. А для этого всё же придётся рассказать о матчасти, хоть немного.
Пару слов о матчасти
Как ни крути, но без знания некой матчасти далеко не уйдёшь.Есть символьные, блочные и сетевые устройства. Также у каждого устройства есть старший и младший номер устройства. Лучше, чем в книге “The Linux Kernel Module Programming Guide” сказать нельзя, по этому приведу цитату из книги в спойлере:
Старший и младший номер устройства
Давайте взглянем на некоторые файлы устройств. Ниже перечислены те из них, которые представляют первые три раздела на первичном жестком диске:
Обратили внимание на столбец с числами, разделенными запятой? Первое число называют «Старшим номером» устройства. Второе — «Младшим номером». Старший номер говорит о том, какой драйвер используется для обслуживания аппаратного обеспечения. Каждый драйвер имеет свой уникальный старший номер. Все файлы устройств с одинаковым старшим номером управляются одним и тем же драйвером. Все из выше перечисленных файлов устройств имеют старший номер, равный 3, потому что все они управляются одним и тем же драйвером.
Младший номер используется драйвером, для различения аппаратных средств, которыми он управляет. Возвращаясь к примеру выше, заметим, что хотя все три устройства обслуживаются одним и тем же драйвером, тем не менее каждое из них имеет уникальный младший номер, поэтому драйвер «видит» их как различные аппаратные устройства.
Устройства подразделяются на две большие группы — блочные и символьные. Основное различие блочных и символьных устройств состоит в том, что обмен данными с блочным устройством производится порциями байт — блоками. Они имеют внутренний буфер, благодаря чему повышается скорость обмена. В большинстве Unix-систем размер одного блока равен 1 килобайту или другому числу, являющемуся степенью числа 2. Символьные же устройства — это лишь каналы передачи информации, по которым данные следуют последовательно, байт за байтом. Большинство устройств относятся к классу символьных, поскольку они не ограничены размером блока и не нуждаются в буферизации. Если первый символ в списке, полученном командой ls-l /dev, ‘b’, тогда это блочное устройство, если ‘c’, тогда — символьное. Устройства, которые были приведены в примере выше — блочные. Ниже приводится список некоторых символьных устройств (последовательные порты):
Если вам интересно узнать, как назначаются старшие номера устройств, загляните в файл /usr/src/linux/documentation/devices.txt.
Все файлы устройств создаются в процессе установки системы с помощью утилиты mknod. Чтобы создать новое устройство, например с именем «coffee», со старшим номером 12 и младшим номером 2, нужно выполнить команду mknod /dev/coffee c 12 2. Вас никто не обязывает размещать файлы устройств в каталоге /dev, тем не менее, делается это в соответствии с принятыми соглашениями. Однако, при разработке драйвера устройства, на период отладки, размещать файл устройства в своем домашнем каталоге — наверное не такая уж и плохая идея. Единственное — не забудьте исправить место для размещения файла устройства после того, как отладка будет закончена.
Еще несколько замечаний, которые явно не касаются обсуждаемой темы, но которые мне хотелось бы сделать. Когда происходит обращение к файлу устройства, ядро использует старший номер файла, для определения драйвера, который должен обработать это обращение. Это означает, что ядро в действительности не использует и даже ничего не знает о младшем номере. Единственный, кто обеспокоен этим — это сам драйвер. Он использует младший номер, чтобы отличить разные физические устройства.
Между прочим, когда я говорю «устройства», я подразумеваю нечто более абстрактное чем, скажем, PCI плата, которую вы можете подержать в руке. Взгляните на эти два файла устройств:
К настоящему моменту вы можете сказать об этих файлах устройств, что оба они — блочные устройства, что обслуживаются одним и тем же драйвером (старший номер 2). Вы можете даже заявить, что они оба представляют ваш дисковод для гибких дисков, несмотря на то, что у вас стоит только один дисковод. Но почему два файла? А дело вот в чем, один из них представляет дисковод для дискет, емкостью 1.44 Мб. Другой — тот же самый дисковод, но для дискет емкостью 1.68 Мб, и соответствует тому, что некоторые люди называют «суперотформатированным» диском («superformatted» disk). Такие дискеты могут хранить больший объем данных, чем стандартно-отформатированная дискета. Вот тот случай, когда два файла устройства, с различным младшими номерами, фактически представляют одно и то же физическое устройство. Так что, слово «устройство», в нашем обсуждении, может означать нечто более абстрактное.
Создаём файл устройства
Мы будем использовать файл-драйвер символьного устройства. Чтобы не заниматься пересказом книги Linux Device Driver, а так же упростить себе жизнь, то я взял готовый пример регистрации символьного драйвера из этой статьи. В данной статье не занимаются поиском свободного фиксированного минора, а используется динамический минор. Для нас — это самое то.
Итак, модуль теперь будет выглядеть следующем образом: работа с экраном, которую мы реализовали выше остаётся без изменений, а вот остальную часть переписываем с нуля.
Определяем структуру file_operations
Для регистрации драйвера заводим вот такую структуру
где MISC_DYNAMIC_MINOR — макрос для динамического минора, строка «lptlcd» — это название устройства, как оно будет выглядеть в папке /dev/ (в нашем случае будет /dev/lptlcd), &lptlcd_fops — указатель на структуру file_operations.
Код регистрации драйвера тоже весьма прост
Дерегистрация устройства проста:
Ну и не забываем макросы установки колбеков, лицензии, автора и версии
Магия начинается в функции dev_read и dev_write. Начну с первой
Делает она следующее: если мы произведём чтение файла устройства, например так:
То нам на экран будет выведена строка за указателем info_str.
Код настолько очевидный, что в комментариях, надеюсь, не нуждается. Единственное, что функция copy_to_user наравне с функцией copy_from_user используется копирования данных между адресными пространствами пользователя и ядра.
Другая функции dev_write, она-то и пихает данные в экран.
На мой взгляд, не добавить и не убрать. Надеюсь тут всё понятно.
Компилируем, добавляем модуль в ядро и смотрим, что у нас появился файл:
Пробуем прочитать из него и записать что-то:

Я водитель НЛО
Всё, мы теперь имеем полностью рабочий драйвер вместе с отвечающим взаимностью устройством! Поздравляю, можно бежать в лабаз за шампанским, и потом в юзерспейсе под волшебные пузырьки писать программы, работающие с этим девайсом.
Но всё же меня лично гложут какие-то сомнения, вот что-то не так…
Хочется БОЛЬШЕГО.
Итак, сейчас мы написали вполне рабочий драйвер, который уже можно использовать в повседневной практике. Выводить на него любой текст, даже текст из файла, использовать в своих программах. Но есть ощущение незавершённости, несовершенства.
Если вы возьмёте и почитаете любую документацию на экран, например статью, которую написал DIHALT о инициализации дисплея для AVR, то будете удивлены богатством возможностей. Например:
1. Можно загрузить текст в память, а затем просто двигать видимую область, экономя такты на загрузку новых данных (как помним, у нас могучие задержки).
2. Можно выводить текст в произвольную позицию.
3. Можно очищать экран.
4. И конечно, можно загружать свои шрифты. Не стоит обольщаться по этому поводу, доступно всего 8 символов. Например, задача реализация русского меню с этим экраном без русского шрифта, с латинскими буквами и частично загруженными русскими (8 символов), превращается во вполне занимательный ребус для целого отдела (было, плавали). Так что это юзается для каких-то специфических символов.
Хороший пример применения возможности загрузки шрифтов я нашёл на кофейном автомате на работе, в котором как раз установлен аналогичный экран, только русифицированный.

Экран на кофейном автомате
Вот тут отлично видно использование символов:
— два символа на сахар, пустой кружок (не догадался снять) и полный;
— пять символов бегущей строки (в символе 5 столбцов).
Итого 2+5 — остаётся всего один запасной символ, который так же, вероятно, используется. Не очень-то разбежишься.
В общем фишек у дисплея полно, так много, что мне уже лениво читать в документации. Но, как мы видим, всего этого мы делать пока не можем. И в этот чудесный момент настало время достать мой рояль из кустов, который уже давным-давно там стоит.
Прежде, чем я приступил к реализации данной идеи (даже до того, как начал покупать детали), я погуглил, а делал ли кто-то подобное. И, о чудо(!) таковой драйвер уже существует. Его написал Michael McLellan и обитает драйвер тут.
Честно скажу, данный драйвер на меня произвёл смешанное впечатление. Скажем так, он стал ценным пособием, как НЕ надо писать драйвера — переписать его под другую схему включения будет нетривиальной задачей, поскольку идёт тупая запись байтов, а каких, куда и зачем — непонятно. Переносимость отсутствует как класс. А куча define-ов для разных ядер выносят моск. Плюс, изначально драйвер задумывался под полную схему включения (8 бит на порт данных, см. схему lcd-mod.sourceforge.net/wiring.php ), а я сразу был нацелен на 4-х битную шину. Она хоть и медленнее (примерно в два раза, т.к. байт посылается двумя посылками), но во-первых, будет меньше паять, а во-вторых — не потребуется отыскивать другие порты. Ну и в третьих, у меня уже был отличный и логичный код для 4-х битной шины. В результате я решил таки написать свой драйвер сам и с нуля, попутно рассказывая как это сделать.
Ладно, к чёрту лирику. В том драйвере есть бесценная штука — это обработка управляющих или ESC-последовательностей. Если потрудится и качнуть этот “рояль”, то можно там найти всякие ридми и хау-ту. Так же на офсайте есть фак. Чтобы вам не пришлось лазать по этим всем данным, я решил собрать всё в одну кучу и на русском языке. Во первых, пару слов об этих последовательностях, вы все уже с ними сталкивались, когда операторе printf добавляли перевод строки в виде ‘\n’ — это и есть простейшая ESC-последовательность, которая интерпретируется, как символ 0Ah в ASCII. Такая же петрушка лежит в управлении данным дисплеем.
Итак, управляющие последовательности, для нашего экрана:
Другие полезные команды, работают без префикса \033!
Идея мне показалось очень крутой, и я нагло решил позаимствовать эту функцию в нашем проекте.
К слову, все эти последовательности чудесно работают в обычной консоли, ими можно пользоваться при выводе текста.
Кто ещё не понял, что это и зачем, то более подробно у него описано тут lcd-mod.sourceforge.net/faq.php. Чтобы не мучаться, я вольно перевёл его и заботливо положил в спойлер с картинками
Q. Хорошо, я установил модуль, как теперь я могу его использовать?
A. Экран будет вести себя почти так же, как vt52-терминал ru.wikipedia.org/wiki/VT52, отличие состоит только в использовании пользовательских шрифтов. Если вы хотите просто вывести текст на экран, вам следует послать его в формате ASCII на устройство. Для начала новой строки, следует отправить символ подачи строки — ‘\r’ и символ перевода каретки ‘\n’ (см. википедию ). Например, дав команду:

Перевод каретки
на экран будет выведено “Line One” и “Line Two” на двух строках экрана. От себя замечу, что опции команды “echo” означают:
-n — не завершать строку символом перевода каретки ‘\n’
-e — включается поддержка интерпретации управляющих последовательностей
Q. Когда я вывожу новую строку на экран, курсор не перемещается в начало строки?
A. Вы должны так же послать на экран символ перевода на новую строку и перевод каретки. Например:
Q. Как я могу передвигать курсор по кругу?
A. Вы можете установить курсор где хотите с помощью специальной управляющей последовательности: ESC-Y[Y-координата+037][X-координата+037]. Например:

Hello в позиции 0:0
Курсор будет перемещён в нулевую строку, нулевой столбец и будет выведено на экран слово “Hello”;
будет выведено тоже самое, но в позицию 1, 1;
Hello в позиции 1:1 (без очистки экрана)
аналогично, но напечатано будет в позицию 2, 2

Hello в позиции 2:2 (без очистки экрана, с предыдущими сообщениями)
Число “037” может немного запутать особенно, если вы не привыкли использовать восьмиричную арифметику, в будущих версиях я думаю о том, чтобы отбросить весь протокол vt52 и заменить его в более понятную реализацию (как автор жестоко ошибается 🙂 )..
Q. Как я могу использовать мои собственные шрифты?
A. Контроллер экрана HD4480 поддерживат до восьми символов определённых пользователем и наш модуль ядра поддерживает это, но это может быть довольной сложной операцией. Я собираюсь написать красивую GUI делающее это для вас, когда я вернусь к ней (или когда вы сможете написать об этом мне). Готов поспорить, что это предложение прочтут сущие единицы. Трололо, проверка на внимательность.
Вы можете установить один символ, отправив в устройство следующую команду: Esc-R[позиция шрифта][8 байт, определяющих битовую маску символа]. Символ определяет только последние пять бит во всём байте, поскольку в символе используется всего 5 столбцов. Я уже говорил об этом выше. Например:
Устанавливает символпо адресу 1, представляющую собой полностью закрашенный блок. Такой же, как я выше приводил у кофейного автомата в полосе готовности.

Символ полностью закрашенного блока
Устанавливает символ по адресу 0 в виде горизонтальных полос.

Символ горизонтальных полос
Чтобы вывести все «левые» символы, надо ввести следующую команду:
В общем, как видно, требуется переписать функцию dev_write. И она теперь стала выглядеть так:
А всю грязную работу по разбору полётов на себя взяла функция handleInput. Код данной функции монструозен, поэтому я его приводить тут не буду. Оставлю вам на домашнее задание разобраться с ним и найти бекдор. Кто найдёт пасхальное яйцо в коде, отмечайтесь в комментах, тому конфетка.
Для затравки видос бекдора (он реализован в драйвере)
ASCII-ART Move! Запускается пасхалкой
Те, кто покажут мне аналогичный видос на своих экранах получат от меня подарок!
В общем, в результате мы получили кошерный экран, который можно использовать для вывода разной полезной и бесполезной информации. Вот, например на него можно выводить текущее время.

И они таки ходят!
Разумеется, написал — поделись с народом! Исходные коды доступны по ссылке (всё никак не соберусь юзать гитхаб для обмена кодом, позор).
Чего хотелось бы сделать
Просто так экранчик на столе мало понятно зачем нужен, это правда. Тем более в век планшетов и прочей техники. Когда всё можно перенаправить на ваш смартфон. Другое дело, что скоро грядёт Новый Год, и вспоминается один замечательный новогодний девайс — ёлочка на процессоре lpc2104

Embedded Artists Cristmas Tree
Не стоит гуглить этот девайс, все упоминания о нём убраны даже с официального сайта, а редкие упоминания о нём сложно найти даже на просторах интернета.
Я даже снял видео работы этой ёлочки
Как работает эмбеддеровская ёлочка
Кроме весёлого мигания огоньками у этого забавного устройства была крутая особенность — можно было вести переписку с другими владельцами таких ёлочек. Был некий сервант, куда через специальную форму можно было вбить сообщение и оно рассылалось по ёлочкам и выводилось на экран. Это было очень и очень круто и весело.
Теперь внимание: идея! Сейчас ничего не мешает заплатить на месяц 500 рублей (а если скинемся, сумма будет совсем мелкой), и арендовать сервак на виртуалке. Туда поставить программулину, которая будет рассылать сообщения. Либо jabber либо какие-то другие способы (да хоть nc и telnet всё сделать). А на компе поставить приёмник этих сообщений. И на Новый Год все мы будем иметь поздравления.
Кто готов помочь это реализовать, и кто будет делать себе такие экраны? Если нас наберётся хотя бы три человека, то будет весьма и весьма весело! Вливайтесь в тусовку разработчиков :)))). Выслушаю ЛЮБЫЕ идеи!
Буду краток. Данным постом я ставил цель не сделать пересказ книги Linux Device Drivers, а просто показать, что написание дров это тривиальная задача. Я умышленно ушёл от USB, т.к. там достаточно много теории, подводных камней и прочего геморроя. Но вы вполне можете переписать данный модуль для USB-LPT-шнурков, типа таких

Делается относительно просто: перехватывается протокол обмена с usb и реализуется в вашей программе. Поверьте — это просто. Будет интересно как — я вам расскажу!
А данный драйвер, поменяв всего ОДНУ(. ) строку вывода в порт можно переписать для применения, например на Raspberry Pi на порт GPIO. Точно, что написать я вам не скажу, но всё решается чтением даташита на используемый проц и занимает всего несколько минут.
Благодарности:
1. Хочу высказать главную благодарность своему учителю Боронину Сергею Сергеевичу sboronin за обучению программированию под linux и прекрасному курсу разработки драйверов под linux. Благодаря его курсам я весьма успешно работаю разработчиком.
2. Камраду Ariman с его замечательной серией статей про разработку дисплея для роутера (первая, вторая, третья часть (а ведь обещалась четвёртая. )). Эта серия, хоть и весьма специфическая, прекрасно иллюстрирует создание устройства и написание для него соответствующих драйверов. И я неоднократно обращался к ней, как к источнику бесценной информации, как в разработке драйверов, так и в разработке модулей для OpenWRT.
3. Разумеется автору книги “Linux Device Driver” Greg Kroah-Hartman. Эта книга просто библия, и в ядре часто можно встретить драйвера, которые базируются на его примерах. Например, в драйверах USB встретил такой:
/drivers/usb/misc/idmouse.c
…
Derived from the USB Skeleton driver 1.1,
Copyright © 2003 Greg Kroah-Hartman (greg@kroah.com)
…
И так во многих драйверах. Так, что пользуйтесь книгой — это библия.
4. Michael McLellan автору аналогичного драйвера. Как он говорит в своём драйвере:
* LCD driver for HD44780 compatible displays connected to the parallel port,
* because real men use device files.
К сожалению у меня нет его координат, кроме ссылки на linkedin. Почта из его программ уже не работает. Так, что как ему лично сказать спасибо, я не знаю… Если кто ему напишет, я буду очень признателен.
Ссылки
1. Исходники моей программы для rootfs работающая с дисплеем качнуть
2. Исходники моего модуля ядра, который мы разбирали в этом посте качнуть
3. «Рояль в кустах»
4. dmilvdv.narod.ru/translate.html Переводы статей. Настольная книга — Linux Device Drivers, Third Edition».
5. Отличная библиотека статей по программированию на русском от IBM обитает тут. Конкретно по разработке модулей ядра
6. Описание дисплея HD44780 (для AVR, но в целом оно универсально) easyelectronics.ru/avr-uchebnyj-kurs-podklyuchenie-k-avr-lcd-displeya-hd44780.html
7. Программы для дисплея (модуль ядра и спектральный анализатор для этого модуля) от Michael McLellan linux.downloadatoz.com/developer-michael-mclellan.html
P.S. Не стреляйте в пианиста, он играет как умеет. Такую громадную статью при моей врождённой неграмотности написать нормально нельзя. Обязательно присылайте мне замечания, правки, и дополнения, буду очень признателен.
P.P.S. Ничто не греет душу так, как оставленный комментарий.
P.P.P.S. В тексте тоже есть пасхалка, кто найдёт — тому конфетка ;)))
UPD Вот я создал группу, для желающих участвовать меседжере 🙂
Для участников, желающих, прошу присоединяться :)))