Программирование микроконтроллеров. С чего начать?

Достаточно часто в личке ко мне обращаются люди с просьбой дать ссылки на полезные сайты, нужную информацию по программированию микроконтроллеров, необходимые программы и т.п. находясь при этом в самом начале своего познания микроконтроллеров. Сам я проходил через это буквально полтора года назад, имея нулевые знания и знаю, насколько это сложно, дать себе первоначального пинка, разобраться в лавине информации по микроконтроллерам, которую выдают поисковики, когда на тебя обрушивается куча непонятной информации и т. п.
Постараюсь объяснить на простом языке, для людей, умеющих держать паяльник, знающих, что такое цифровая микросхема логики, умеющих читать схемы и пользоваться мультиметром.
Микроконтроллеры бывают разных фирм, которые делают одно и тоже дело, но разными методами. Сравнить это можно с человеческими расами: европейцы, китайцы и африканцы например. Я лично работаю с микроконтроллерами фирмы Атмел, про них и буду говорить. Ну уж пошло сравнение с расами, пускай это будут европейцы.) Программы для микроконтроллеров пишут на языках программирования. Я рекомендую начать с языка Си. Это древний и простой язык. Для написания текста програмы используют программы компиляторы. Они позволяют создавать, редактировать и переваривать написанный программистом текст программы в код (прошивку), который можно загрузить (прошить) в микроконтроллер. Таких программ есть множество. Пример для Атмел: Code VisionAVR, родная от Атмел AVR Studio, Bascom-avr и ещё.
Эти программы делают одно и тоже дело, но своими методами, особенностями достоинствами и недостатками. При это текст Си в тих программах компиляторах немного отличается, но в общем похож. Можно сравнить с различием украинского, русского и белорусского языка. Я использую Code VisionAVR, что и советую начинающим.
Далее я приведу простой текст программы, написанный на языке Си в компиляторе Code VisionAVR для микроконтроллера ATTiny13A. В конце темы есть проект, прошивка и проект для эмулятора протеуса. Микроконтроллер в этой программе умеет делать простую вещь: при помощи кнопки менять логическое состояние на двух выходах, при этом короткое нажатие меняет состояние первого выхода а длинное — второго. В автомобиле например эту схему можно применить для управления одной кнопкой обогревом заднего стекла (которая есть у многих штатно) и добавленным обогревом зеркал. Нажал коротко на кнопку — сработал обогрев стекла, нажал ещё — обогрев стекла выключился. Если нажать и удерживать кнопку, то через какое-то время включиться обогрев зеркал. Если нажать и удерживать кнопку повторно — обогрев зеркал отключится.
Для понятия текста нужно знать грамматику, правила писанины языка Си, этого материала в интернете предостаточно. Так же желательно ознакомиться хотя бы с материалом, по использованию мастера создания проектов в CodeVisionAVR.
/*****************************************************
This program was produced by the
CodeWizardAVR V2.05.0 Professional
Automatic Program Generator
© Copyright 1998-2010 Pavel Haiduc, HP InfoTech s.r.l.
www.hpinfotech.com
Project :
Version :
Date : 28.01.2012
Author :
Company :
Comments:
Chip type : ATtiny13A
AVR Core Clock frequency: 9,600000 MHz
Memory model : Tiny
External RAM size : 0
Data Stack size : 16
*****************************************************/
unsigned char b, trig;
void main(void)
<
// Declare your local variables here
// Crystal Oscillator division factor: 1
#pragma optsize-
CLKPR=0x80;
CLKPR=0x00;
#ifdef _OPTIMIZE_SIZE_
#pragma optsize+
#endif
А теперь поподробнее.
/*****************************************************
This program was produced by the
CodeWizardAVR V2.05.0 Professional
Automatic Program Generator
© Copyright 1998-2010 Pavel Haiduc, HP InfoTech s.r.l.
www.hpinfotech.com
Project :
Version :
Date : 28.01.2012
Author :
Company :
Comments:
Chip type : ATtiny13A
AVR Core Clock frequency: 9,600000 MHz
Memory model : Tiny
External RAM size : 0
Data Stack size : 16
*****************************************************/
Это шапка, в которой содержится описание проекта, необходимые данные. Текст закомментирован знаками комментария /* в начале и */ в конце. Все, что находится между этими знаками программой не выполняется. Самое полезное здесь это указание типа микроконтроллера и его частота.
Это ссылка на библиотеку. Если какая либо библиотека необходима, то она должна быть здесь указана. У нас есть библиотека самого микроконтроллера tiny13a.h, и библиотека задержек времени.
unsigned char a, b, trig;
void main(void)
<
// Declare your local variables here
void main(void) — это оператор, говорящий что началась основная часть программы на Cи и микроконтроллер будет её с этого места выполнять. Все что начинается с // — это комментарий. Старайтесь чаще ими пользоваться. Вообще конкретный комментарий генерирует сам компилятор, как и во многих других местах. Большинство комментариев я удалил, что уменьшить текст.
// Crystal Oscillator division factor: 1
#pragma optsize-
CLKPR=0x80;
CLKPR=0x00;
#ifdef _OPTIMIZE_SIZE_
#pragma optsize+
#endif
В комментарии по английски написано, что это такое. Это первая команда микроконтроллеру, одна из команд, которая настраивает нужные функции, порты и необходимые части микроконтроллера, необходимые для его работы и запуска.
Конкретно это настройка частоты делителя тактовой частоты микроконтроллера. Теперь подробнее:
Микроконтроллер имеет тактовый генератор, который задается в мастере и который потом можно изменить в свойствах проекта если что. У нас эта частота 9.6 мегагерца, как видно в шапке.
При прошивке микроконтроллера эту же частоту нужно указать во фьюзах.
CLKPR=0x80; и CLKPR=0x00; это команды настройки регистра внутреннего делителя этой частоты. Задается оно в мастере в первом окне «CHIP». Если у нас выбран делитель 1, то тактовая частота делиться на 1, то есть остается без изменений. Если указать например делитель 128, то соответственно тактовая частота делиться на это число. 9.6Мгц / 128 = 75кГц. и значения регистра делителя будет выглядеть:
CLKPR=0x80;
CLKPR=0x07;
Особо внимательные заметили, в регистр делителя CLKPR сначала пишется число 0x80 а затем сразу 0x00. Нафига пишется сначала одно значение а потом сразу другое? Если у вас возникают какие либо вопросы по регистрам и не только, приучайтесь сразу читать даташиты. Там все подробные ответы на чистом английском языке. Открываете даташит, вставляете в поисковик текста название регистра (CLKPR ) и ищете его описание, за что какие биты данного регистра отвечают. Конкретно у этого регистра для изменения делителя необходимо записать единичку в седьмой бит, после чего микроконтроллер даст изменить и выбрать необходимый делитель в первых четырех битах этого регистра. После того, как пройдет четыре такта выполнения команд процессора, изменить регистр будет уже нельзя. Нужно снова сначала изменить седьмой бит CLKPR=0x80 а затем указать делитель CLKPR=нужный делитель
Команды управления и настройкой портов микроконтроллеров — ножек чипа. Задается тоже в мастере. В этих регистрах задается работа на вход порта PB0 и подключается к нему внутренний Pull-up резистор. Порты PB1 и PB2 настраиваются «на выход» с логическим нулем на выходе в их состоянии.
В колонке DataDitection мы указывает тип порта: вход или выход (in или out)
В колонке PullUp/Output Value указываем подключение подтягивающего резистора pullup если порт настроен на вход (P — подключен, Т — неподключен) Если порт настроен на выход, то можно указать его логическое состояние 0 или 1. У нас нули. Строчки Bit0 — Bit5 это порты микроконтроллера PORTB0 — PORTB5
Если посмотреть сгенерированный компилятором комментарий, то можно увидеть соответствие пинов и их настройку:
// Input/Output Ports initialization
// Port B initialization
// Func5=In Func4=In Func3=In Func2=Out Func1=Out Func0=In
// State5=T State4=T State3=T State2=0 State1=0 State0=P
Если перевести из 16-тиричного в двоичный значение регистров, то можно понять даже без даташита назначение битов в регистре:
PORTB=0x01 PORTB=0b00000001
DDRB=0x06 DDRB=0b00000110
Напоминаю, что при разложении в двоичный код младшие значения справа а старшие слева.
Незначащие нули слева можно не писать:
А можно вообще написать в десятичной системе:
PORTB=1;
DDRB=6;
Далее по тексту кода идет:
Настройка таймера микроконтроллера, прерываний, АЦП, компаратора и всего такого пока сложного. Пока его не используем — рановато. У всех этих регистров стоят в значениях нули, это значит, что они отключены. А особо внимательные заметили, что какой-то регистр ACSR имеет значение =0x80; Лезем в даташит и читаем:
Analog Comparator Control and Status Register – ACSR
Вообще, как правило название всех регистров это сокращение от первых букв или части их полного названия.
Если стоит значение данного регистра 0x80, значит в двоичной системе это число 10000000, значит стоит единичка в 7 бите этого регистра, значит читаем в даташите, что он означает:
• Bit 7 – ACD: Analog Comparator Disable
When this bit is written logic one, the power to the Analog Comparator is switched off.
This bit can be set at any time to turn off the Analog Comparator. This will reduce power
consumption in Active and Idle mode. When changing the ACD bit, the Analog Comparator
Interrupt must be disabled by clearing the ACIE bit in ACSR. Otherwise an interrupt
can occur when the bit is changed.
По-русски это означает, что установка единицы в этом бите отключает аналоговый компаратор, что его можно выключить в любой момент, что это приводит к снижению потребления электричества, и в конце текста написано про зависимости и что нужно соблюдать, если нужно изменять этот бит.
После того, как микроконтроллер настроен запущен и выполнена инициализация необходимых частей и выполнены необходимые первоначальные команды в void main(void) в дело вступает его величество главный цикл. Все что находиться внутри этого главного цикла while (1) и заключено в скобки начала <и конца > будет крутиться, команды выполняться по кругу от начал до конца. А у нас в нашем коде будет крутиться алгоритм опроса кнопки, подключенной к порту PB0, от состояния которой (нажата кнопка или нет) будет меняться состояние выходных портов PB1 и PB2
На картинке видна схема собранную в эмуляторе Протеус схему, которая позволяет видеть работу кода программы.
Теперь про сами основные команды, которые находятся внутри цикла. Все команды используют один оператор if Это условие ЕСЛИ.
Если в регистре PINB в бите, отвечающем за порт PB0 микроконтроллера.0 содержится значение равное нулю ==0, то выполняем кучку кода, которая находится далее в границах скобок <и >
Короче, если нажата кнопка то выполняется следующий код в границах последующих скобок <и >
Далее после кучки кода в скобках видим оператор else и ещё кучку кода за ним в скобках <и >
Оператор else переводится не как ещё а как иначе
Оператор if и else всегда работают в паре, сначала идет if затем else. Оператор else можно не использовать совсем, если он не нужен.
В нашей ситуации алгоритм можно описать так:
если (нажата кнопка подключенная к порту PB0)
<
то выполняем кучку кода;
>
иначе (кнопка не нажата)
<
выполняем эту кучку кода;
>
Так как это все находится внутри главного цикла, то этот код будет выполняться по кругу, будет постоянно опрашиваться кнопка и будет выполняться нужная кучка кода
Теперь рассмотрим кучку кода, которая выполняется, если кнопка нажата:
Операторы можно вкладывать друг в друга, как матрешку. то есть выполняется одно условие, потом если условие сработало, то другое внутри первого условия и т.д.
Если переменное значение trig равняется нулю, то выполняем инкремент переменной b Инкремент — операция увеличения значения, хранящегося в переменной, на 1. То есть при проходе выполнения кода, если процессор натыкается на команду инкремента b++, то процессор прибавляет единичку в число, которое находится в переменной b
Так же здесь применяется упрощенная «орфография» написания условия и команды, без скобок <и >:
Такое представление используют, если после условия всего одна команда.
Немного отвлеклись, возвращаемся:
if (trig==0) b++; — если значение переменной равно нулю (а оно у нас равно нулю) то выполняем инкремент переменной b — переменная в была равна нулю, теперь стало единице.
Если переменная b больше ста, то выполняем кучку кода внутри скобок.
Переменная b за каждый круг цикла прибавляется на единичку и в итоге через сто «кругов» главного цикла выполниться условие, которая находится далее внутри скобок <и >
Теперь рассмотрим что же там делается, если нажата кнопка, если прошло сто кругов цикла:
Здесь мы видим ещё одно условие (жирная такая матрешка получилась))
if (PINB.2==0)PORTB.2=1;
Если регистр состояния выходного порта PB, а точнее PB2 равен нулю, то меняем его состояние на единичку PORTB.2=1.
else PORTB.2=0;
Иначе пишем в регистр нолик. Или если по-другому: если регистр состояния выходного порта PB2 равен единице, то меняем его на ноль.
Короче если происходит выполнение этих условий и команд, то меняется логическое состояние выхода 2 (PB2) на схеме.
Если полностью описать: если нажата кнопка, если прошло сто кругов главного цикла, то меняем логическое состояние выхода 2 — PORTB.2 в коде он же порт PB2 на схеме.
Как уже стало понятно этот кусок кода отрабатывает длительное нажатие кнопки.
Но этого мало, дальше ещё есть две выполняемые команды присвоения:
trig=1; присвоение единице этой переменной необходимо, что бы описанное выше условие работы инкремента b++ перестало работать
b=0; обнуляем переменную b.
В итоге при длительном нажатии кнопки, условие при котором меняется состояние порта PB2 выполняется единожды, до тех пор, пока кнопка не будет отжата кнопка, ибо инкремент не будет работать и условие if (b>100) больше не сработает, если тупо нажать кнопку и не отпускать совсем.
Теперь вторая часть кучки кода, которая следует за первым условием:
else
<
if (b>4)
<
if (PINB.1==0)PORTB.1=1;
else PORTB.1=0;
b=0;
>
b=0;
trig=0;
>
Если кнопка отжата:
Опишем её с конца:
trig=0; присваиваем переменной trig значение ноль. Необходимо, что бы после длительного нажатия, когда наступит последующее отжатие кнопки микроконтроллер снова был готов к нажатиям кнопки ( срабатывало условие инкремента if (trig==0) b++;)
b=0; При не нажатой кнопке значение переменной b равняется нулю.
if (b>4)
<
if (PINB.1==0)PORTB.1=1;
else PORTB.1=0;
b=0;
>
Подробнее:
if (b>4)
Если значение переменной b больше четырех, то выполняем следующий код:
if (PINB.1==0)PORTB.1=1;
else PORTB.1=0;
Если состояние порта BP1 равно нулю, то делаем единицу, если нет, то ноль.
Это условие и команда отрабатывает кроткое нажатие кнопки. Если нажата кнопка, то начинает работать инкремент b++; значение которого начинает увеличиваться. Если отжать кнопку и при этом значение переменной b будет больше четырех ( но меньше ста — а то сработает длинное нажатие) то состояние выходного порта PB1 (он же выход 1 на схеме, он же PORTB.1 в коде) поменяется, сработает алгоритм короткого нажатия кнопки.
Если значение переменной b при отжатии меньше четырех, то условие не срабатывает и ничего не происходит. необходимо для работы «дребезга контактов» и ложных срабатываний.
И последнее это присвоение переменной b нулевого значения, что бы обработка алгоритма короткого нажатия происходило единожды.
В оконцовке главного цикла виднеется команда:
Это задержка в главном цикле. То есть, выполняется пошагово команды, затем процессор натыкается на команду delay_ms(10); и начинает её выполнять. В итоге процессор будет 10 миллисекунд ждать и ничего не делать в этой строчке, затем опять приступит к выполнению команд.
Находясь в одном общем цикле, скорость нарастания значения инкремента b++ зависит от времени задержки, указанной в delay_ms.
Как видно из описания, длинное нажатие срабатывает от фронта сигнала нажатия кнопки ( начинает работать инкремент) а короткое нажатие кнопки — по спаду, то есть срабатывает по отжатию кнопки.
Вообще выполняемая здесь последовательность: условие + инкремент достаточно часто используемая команда и в языке Си присутствует отдельный оператор для этого for
Архив с прошивкой, исходником и моделью Протеуса:
umat.ru/files/Button_13.zip
ВНИМАНИЕ!
Архив перезалил 22 сентября 2014 года, обнаружил косяк в выставленной частоте в проекте. Теперь тактовая частота 1.2 Мегагерца, при этом фьюзы стоят по дефолту и их при прошивке трогать вообще не надо
Вы еще не программируете микроконтроллеры? Тогда мы идем к вам!
 Здравствуйте, уважаемые Хабражители!
Здравствуйте, уважаемые Хабражители!
В этой статье я хочу рассказать о том, как однажды решил начать программировать микроконтроллеры, что для этого понадобилось и что в итоге получилось.
Тема микроконтроллеров меня заинтересовала очень давно, году этак в 2001. Но тогда достать программатор по месту жительства оказалось проблематично, а о покупке через Интернет и речи не было. Пришлось отложить это дело до лучших времен. И вот, в один прекрасный день я обнаружил, что лучшие времена пришли не выходя из дома можно купить все, что мне было нужно. Решил попробовать. Итак, что нам понадобится:
1. Программатор

Для прошивки надо соединить выходы программатора VCC, GND, RESET, SCK, MOSI, MISO с соответствующими выходами микроконтроллера. Для простоты я собрал вспомогательную схему прямо на макетной плате:
Слева на плате — тот самый микроконтроллер, который мы собираемся прошивать.
2. Микроконтроллер
С выбором микроконтроллера я особо не заморачивался и взял ATmega8 от Atmel — 23 пина ввода/вывода, два 8-битных таймера, один 16-битный, частота — до 16 Мгц, маленькое потребление (1-3.6 мА), дешевый ($2). В общем, для начала — более чем достаточно.
Под Linux для компиляции и загрузки прошивки на контроллер отлично работает связка avr-gcc + avrdude. Установка тривиальная. Следуя инструкции, можно за несколько минут установить все необходимое ПО. Единственный ньюанс, на который следует обратить внимание — avrdude (ПО для записи на контроллер) может потребовать права супер-пользователя для доступа к программатору. Выход — запустить через sudo (не очень хорошая идея), либо прописать специальные udev права. Синтаксис может отличаться в разных версиях ОС, но в моем случае (Linux Mint 15) сработало добавление следующего правила в файл /etc/udev/rules.d/41-atmega.rules :
После этого, естественно, необходим перезапуск сервиса
Компилировать и прошивать без проблем можно прямо из командной строки (кто бы сомневался), но если проектов много, то удобнее поставить плагин AVR Eclipse и делать все прямо из среды Eclipse.
Под Windows придется поставить драйвер. В остальном проблем нет. Ради научного интереса попробовал связку AVR Studio + eXtreme Burner в Windows. Опять-таки, все работает на ура.
Начинаем программировать
Программировать AVR контроллеры можно как на ассемблере (AVR assembler), так и на Си. Тут, думаю, каждый должен сделать свой выбор сам в зависимости от конкретной задачи и своих предпочтений. Лично я в первую очередь начал ковырять ассемблер. При программировании на ассемблере архитектура устройства становится понятнее и появляется ощущение, что копаешься непосредственно во внутренностях контроллера. К тому же полагаю, что в особенно критических по размеру и производительности программах знание ассемблера может очень пригодиться. После ознакомления с AVR ассемблером я переполз на Си.
После знакомства с архитектурой и основными принципами, решил собрать что-то полезное и интересное. Тут мне помогла дочурка, она занимается шахматами и в один прекрасный вечер заявила, что хочет иметь часы-таймер для партий на время. БАЦ! Вот она — идея первого проекта! Можно было конечно заказать их на том же eBay, но захотелось сделать свои собственные часы, с блэк… эээ… с индикаторами и кнопочками. Сказано — сделано!
Разбор полета
Рассмотрим каждую функцию в отдельности.
Настройка портов ввода/вывода происходит очень просто — в регистр DDRx (где x — буква, обозначающая порт) записивается число, каждый бит которого означает, будет ли соответствующий пин устройством ввода (соответствует 0) либо вывода (соответствует 1). Таким образом, заслав в DDRB и DDRD число 0xFF, мы сделали B и D портами вывода. Соответственно, команда DDRC = 0b11100000; превращает первые 5 пинов порта C во входные пины, а оставшиеся — в выходные. Команда PORTC |= 0b00011111; включает внутренние подтягивающие резисторы на 5 входах контроллера. Согласно схеме, к этим входам подключены кнопки, которые при нажатии замкнут их на землю. Таким образом контроллер понимает, что кнопка нажата.
Далее следует настройка двух таймеров, Timer0 и Timer1. Первый мы используем для обновления индикаторов, а второй — для обратного отсчета времени, предварительно настроив его на срабатывание каждую секунду. Подробное описание всех констант и метода настройки таймера на определенноый интервал можно найти в документации к ATmega8.
При срабатывании таймера управление передается соответствующему обработчику прерывания. В нашем случае это обработчик TIMER0_OVF_vect, который вызывает процедуру вывода времени на индикаторы, и TIMER1_COMPA_vect, который обрабатывает обратный отсчет.
Вывод на индикаторы
Функция display использует метод динамической индикации. Дело в том, что каждый отдельно взятый индикатор имеет 9 контактов (7 для управления сегментами, 1 для точки и 1 для питания). Для управления 4 цифрами понадобилось бы 36 контактов. Слишком расточительно. Поэтому вывод разрядов на индикатор с несколькими цифрами организован по следующему принципу:
Напряжение поочередно подается на каждый из общих контактов, что позволяет высветить на соответствующем индикаторе нужную цифру при помощи одних и тех же 8 управляющих контактов. При достаточно высокой частоте вывода это выглядит для глаза как статическая картинка. Именно поэтому все 8 питающих контактов обоих индикаторов на схеме подключены к 8 выходам порта D, а 16 управляющих сегментами контактов соединены попарно и подключены к 8 выходам порта B. Таким образом, функция display с задержкой в 0.25 мс попеременно выводит нужную цифру на каждый из индикаторов. Под конец отключаются все выходы, подающие напряжение на индикаторы (команда PORTD = 0; ). Если этого не сделать, то последняя выводимая цифра будет продолжать гореть до следующего вызова функции display, что приведет к ее более яркому свечению по сравнению с остальными.
Прототип был собран на макетной плате:
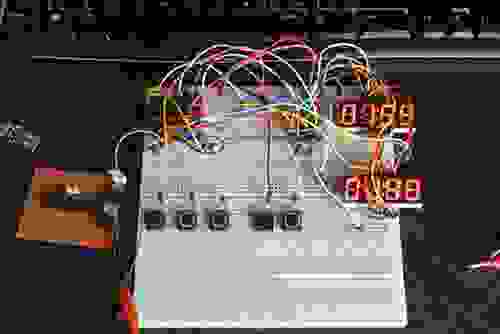
После тестирования прототипа пришло время все это добро разместить в корпусе, обеспечить питание и т.д.

Ниже показан окончательный вид устройства. Часы питаются от 9-вольтовой батарейки типа “Крона”. Потребление тока — 55 мА.
